
Бесконтактные двигатели постоянного тока.
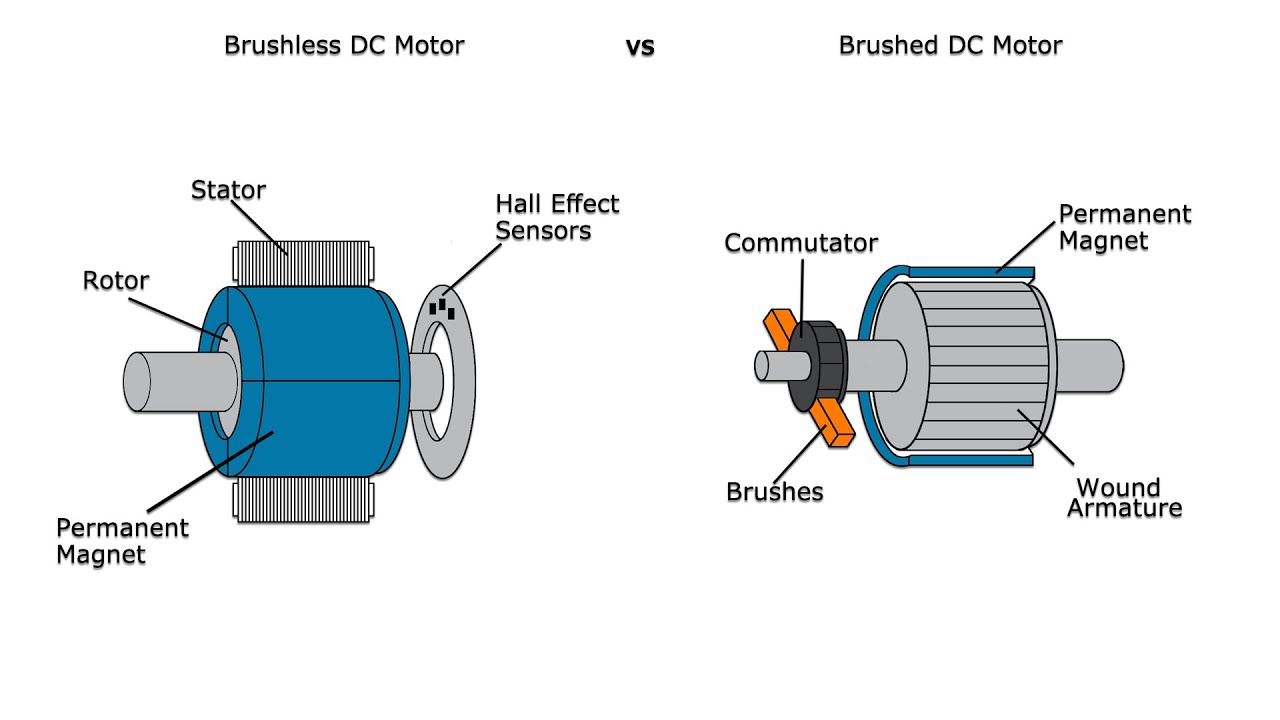
Бесконтактные двигатели постоянного тока, обладая всеми положительными свойствами обычных двигателей постоянного тока, лишены их основного недостатка – щеточно-коллекторного узла, существенно снижающего их надежность.
В бесконтактном двигателе применяют машину обращенной конструкции, в которой якорь с обмотками неподвижен, а полюсы вращаются. В этом случае щеточно-коллекторный узел можно заменить статическим полупроводниковым коммутатором, который управляется датчиком положения. В коллекторном двигателе датчиком положения (определяющим момент коммутации секции якоря) является сама коллекторная пластина,
подходящая под соответствующую щетку в момент прохождения секцией нейтральной зоны (зоны коммутации).
Статический коммутатор, получая сигналы управления с датчика положения ротора обеспечивает при вращении ротора такое же изменение токов в обмотке якоря, как и щетки с коллектором.
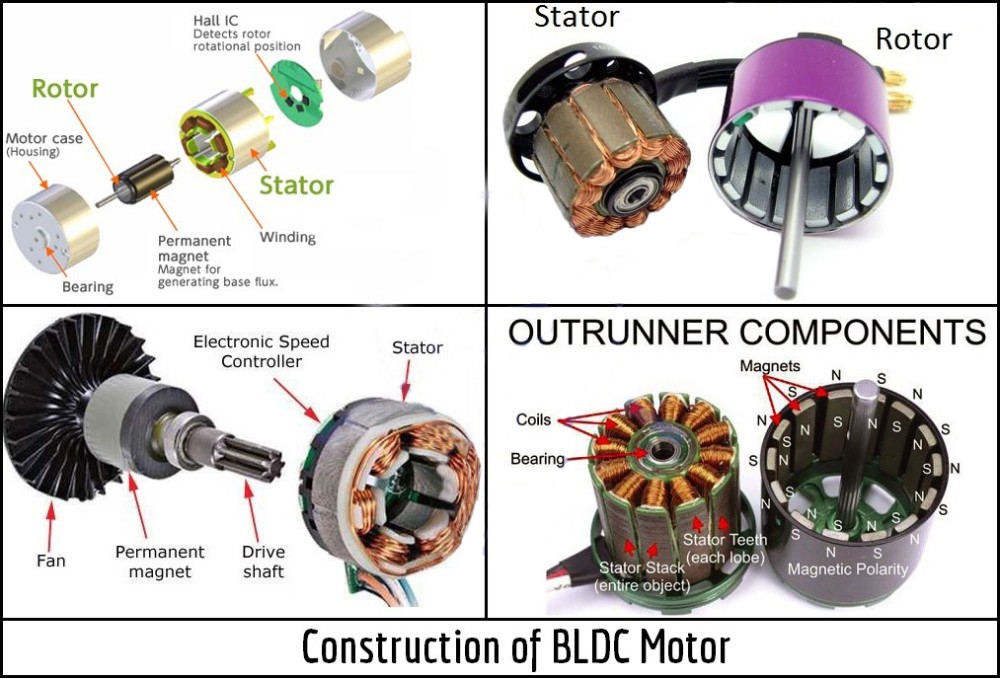
Бесконтактные двигатели постоянного тока состоят из трех элементов: бесконтактного двигателя с m-фазной обмоткой статора
и ротором в виде постоянного магнита; датчика положения ротора для выработки сигналов управления полупроводниковыми ключами;
бесконтактного коммутатора, осуществляющего по сигналам датчика положения коммутацию токов в обмотках статора двигателя.
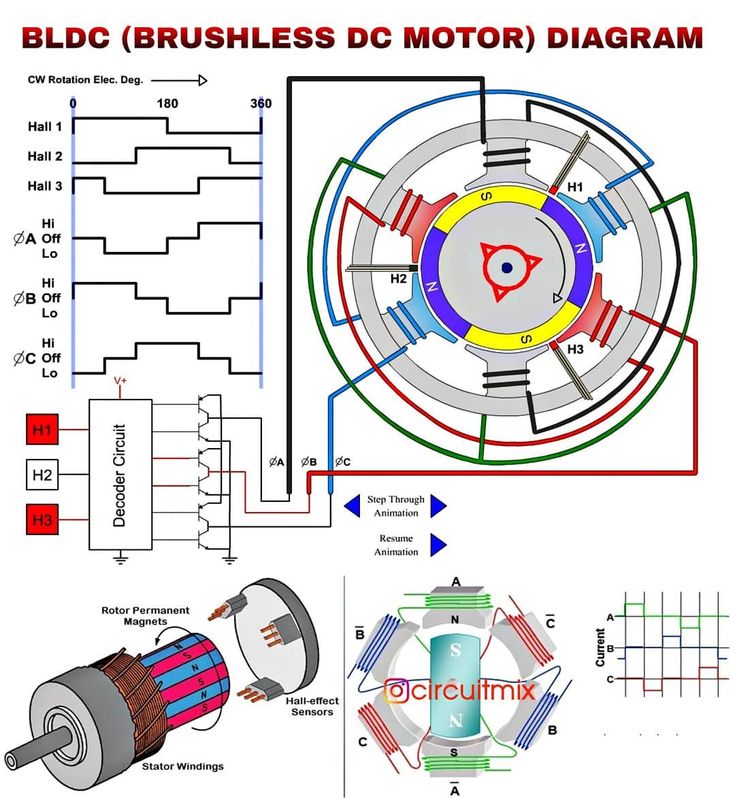
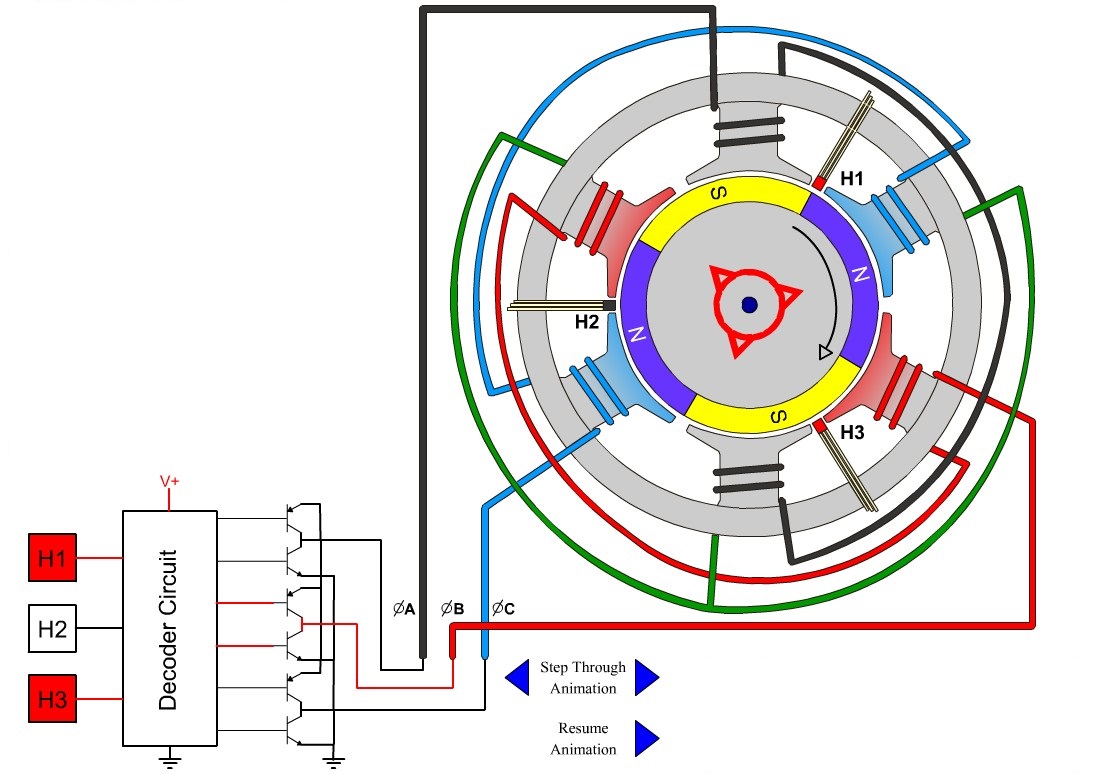
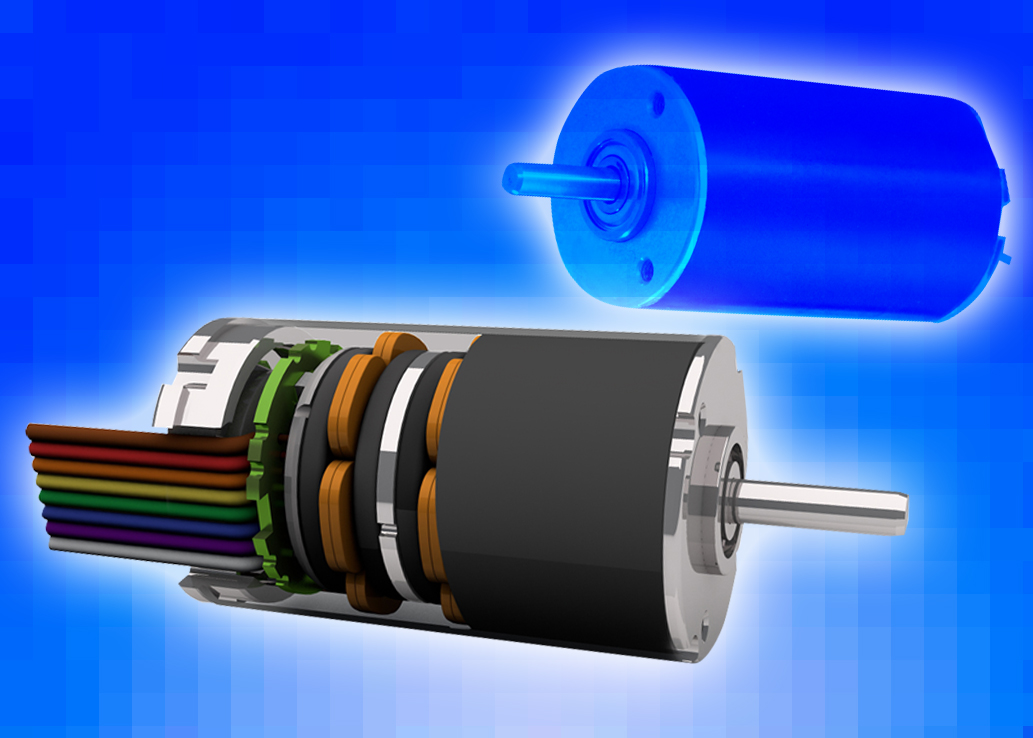
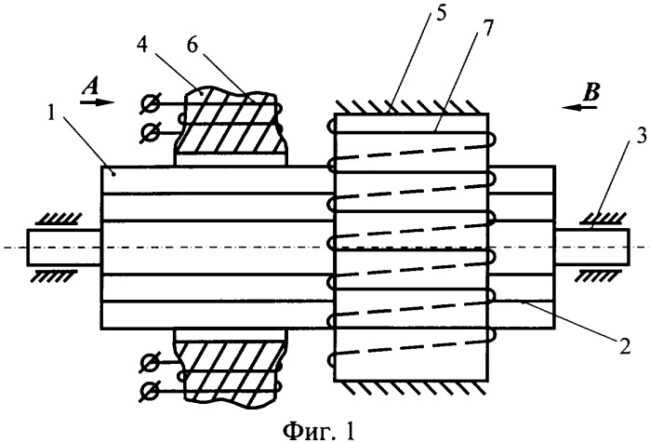
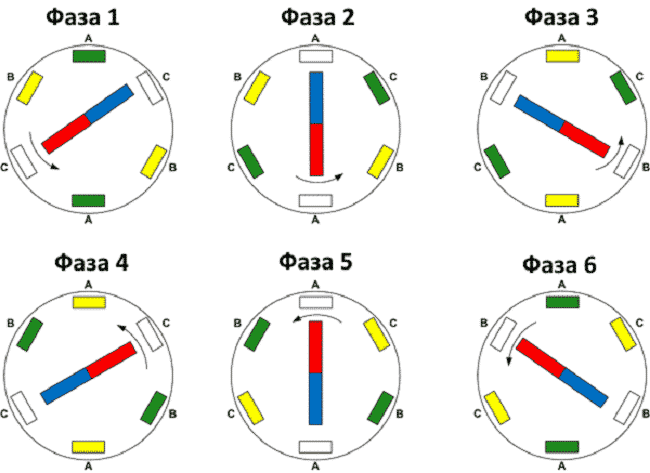
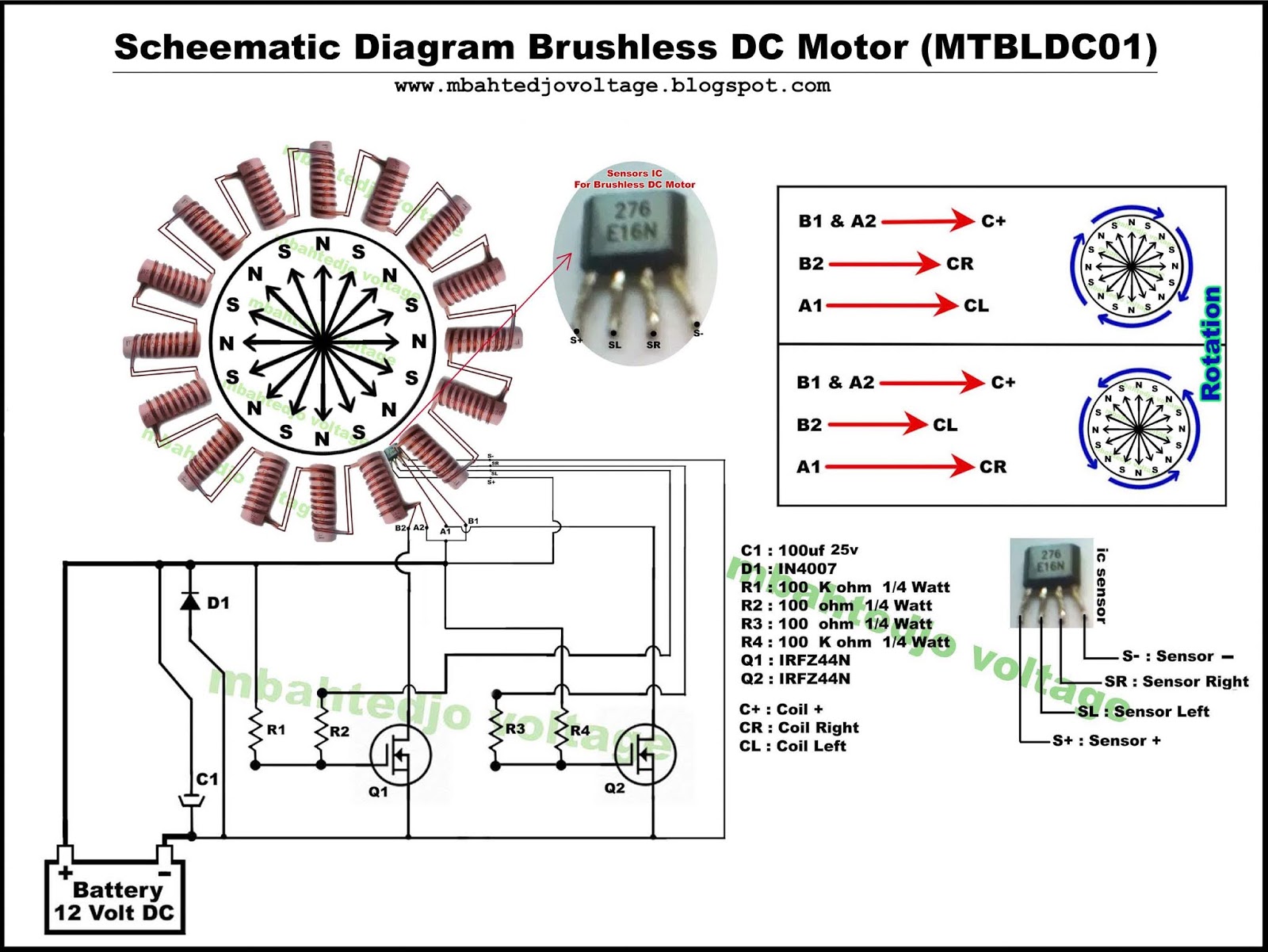
На рис. 10.4 представлена модель двигателя. В качестве датчика 1 положения ротора 2 двигателя 3 использованы оптические датчики (фототранзисторы). Три фототранзистора РТ1, РТ2 и РТ3, расположенные с интервалом 1200 на периферии платы, последовательно освещаются с помощью вращающегося затвора, установленного на валу двигателя. При расположении южного полюса магнита напротив неподвижного полюса Р2 статора освещен фототранзистор РT 1, который открывает транзистор VT1 коммутатора 4. На неподвижном полюсе Р1 статора создается южный полюс за счет протекания тока по обмотке W1, который притягивает северный полюс ротора, заставляя ротор поворачиваться против часовой стрелки. При повороте ротора его северный полюс оказывается напротив неподвижного полюса Р1. Затвор, установленный на валу ротора, затемняет фототранзистор РТ1и освещает фототранзистор РТ2, последний включает транзистор VT2. Протекающий по обмотке W2 ток создает южный полюс на неподвижном полюсе Р2, тогда северный полюс ротора повернется по стрелке и расположится напротив неподвижного полюса Р2. В этот момент затвор затемняет фототранзистор РТ2 и освещает РТ3, что обесточивает обмотку W2 и включает обмотку W3. При этом неподвижный полюс Р2 размагничивается, а неподвижный полюс Р3 намагничивается и становится южным полюсом. Следовательно, северный полюс ротора продолжит свое вращение от Р2 к Р3. Ротор будет непрерывно вращаться, если переключения транзисторов повторяются в той же последовательности.
Для реверсирования бесконтактного двигателя необходимы схемотехнические решения заключающиеся в изменении последовательности переключения транзисторов.
Более совершенной схемой управления бесконтактным двигателем является мостовая схема, в которой на каждую фазу обмотки статора приходится по два транзистора и благодаря этому одновременно работают две фазы статора. Эта схема требует большего числа транзисторов и датчиков положения.
Регулирование частоты вращения двигателя в широких пределах возможно изменением питающего напряжения, что при транзисторном коммутаторе реализуется также просто.
При увеличении числа ключей в коммутаторе до количества
коллекторных пластин двигателя постоянного тока свойства бесконтактного двигателя такие же, как и коллекторного двигателя. При этом исключается из схемы ненадежный щеточно-коллекторный узел.
В бесконтактных двигателях большой мощности вместо постоянного магнита на роторе применяют обмотку возбуждения.
В качестве датчиков положения кроме рассмотренных фототранзисторов применяют электромагнитные датчики и элементы Холла.
При увеличении числа ключей в коммутаторе до количества
коллекторных пластин двигателя постоянного тока свойства бесконтактного двигателя такие же, как и коллекторного двигателя. При этом исключается из схемы ненадежный щеточно-коллекторный узел.
В бесконтактных двигателях большой мощности вместо постоянного магнита на роторе применяют обмотку возбуждения.
В качестве датчиков положения кроме рассмотренных фототранзисторов применяют электромагнитные датчики и элементы Холла.
Brushless motor и его преимущества
Brushless motor, или бесколлекторный двигатель, является электрическим двигателем, не имеющим щеток. В отличие от обычных двигателей, где щетки используются для передачи электрического тока на вращающуюся часть, brushless motor использует электронику для управления током.
У brushless motor есть несколько преимуществ перед традиционными двигателями с щетками:
- Более высокая эффективность: Благодаря отсутствию щеток, которые требуют постоянного замены и могут создавать трение, brushless motor обеспечивает более высокую эффективность работы.
- Большая надежность и долговечность: Без щеток, которые могут износиться или повредиться, brushless motor обладает большей надежностью и долговечностью.
- Более высокая мощность и крутящий момент: Благодаря лучшему управлению током, brushless motor способен выдавать большую мощность и крутящий момент по сравнению с традиционными двигателями.
- Бесшумная работа: Благодаря отсутствию щеток, которые могут создавать шум и вибрацию, brushless motor работает бесшумно.
- Легкость и компактность: Без щеток, brushless motor имеет более компактный и легкий дизайн.
Все эти преимущества делают brushless motor идеальным выбором для широкого спектра применений, включая электроинструменты, автомобильные системы, дроны и другие устройства, где требуется высокая мощность, эффективность и долговечность двигателя.
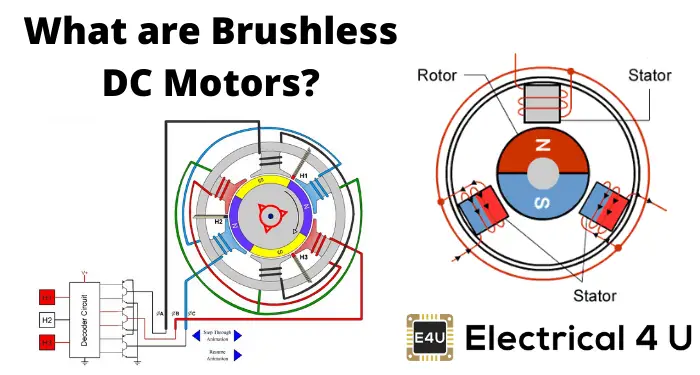
Принцип работы и конструкция
Работа всех двигателей, как правило, основаны на двух принципах, которые являются ; Закон Ампера и закон Фарадея. В первый закон гласит, что электрический проводник, помещенный в магнитное поле, будет испытывать силу, если какой — либо ток, протекающий через проводник имеет компонент под прямым углом к этой области. В втором принципе гласит, что если проводник перемещается через магнитное поле, то любой компонент движение перпендикулярно к этой области будет генерировать разность потенциалов между концами проводника.
Согласно этим законам электродвигатели состоят из двух основных частей; Постоянный магнит и связка проводников, скрученных в катушку. Подавая электричество на катушку, она становится магнитом, и, основываясь на том факте, что магниты отталкиваются на одинаковых полюсах и притягиваются на разных полюсах, достигается вращательное движение.
What do the numbers mean?
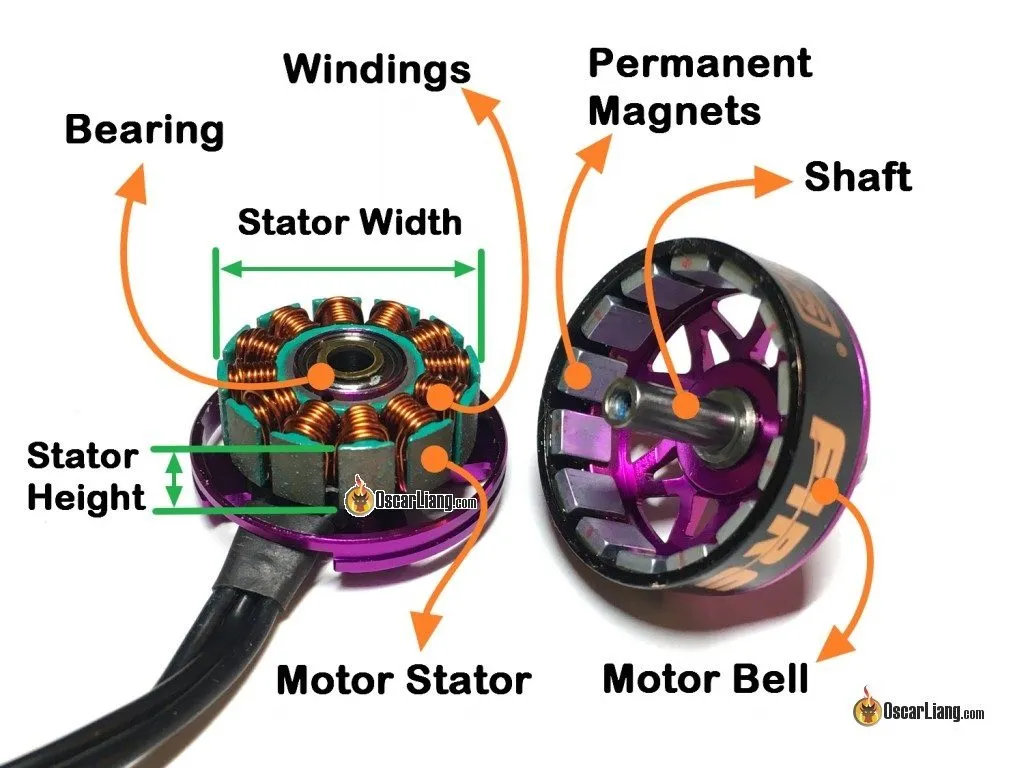
As you shop around for some brushless motors you will notice that there is often a trend in motor naming with a series of 4 numbers and might wonder what those numbers mean. It’s simple enough; most motors have a few letters followed by 4 number. the letters hold no significance (usually a model or series name, such as MT series motors, or Q series for quadcopter), whereas the numbers tell you the essential measurements of the motor.
Generally, the first two numbers indicate the diameter of the entire can of the motor OR the diameter of the stator (the inner part of the motor) only. Please see the picture at the below for clarification.
Similarly, the second pair of numbers can indicate either the height of the entire motor, or only the height of the stator. In this case of the MT2204 motors that unmanned tech, these numbers indicate the stator diameter and height, and so we have an 22mm stator diameter, and a 4mm stator height.
The size of the motor can give you an idea about what size drone you will use with the motor. Typical FPV racing miniquads will use 1806 or 2204 motors, whereas larger quadcopters that are designed to carry a gopro camera will typically be around the 2212 size.
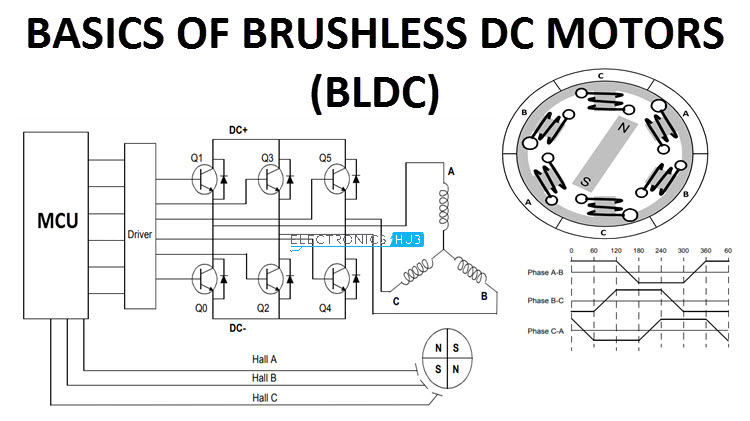
Зачем нам нужен ESC и в чем его функция?
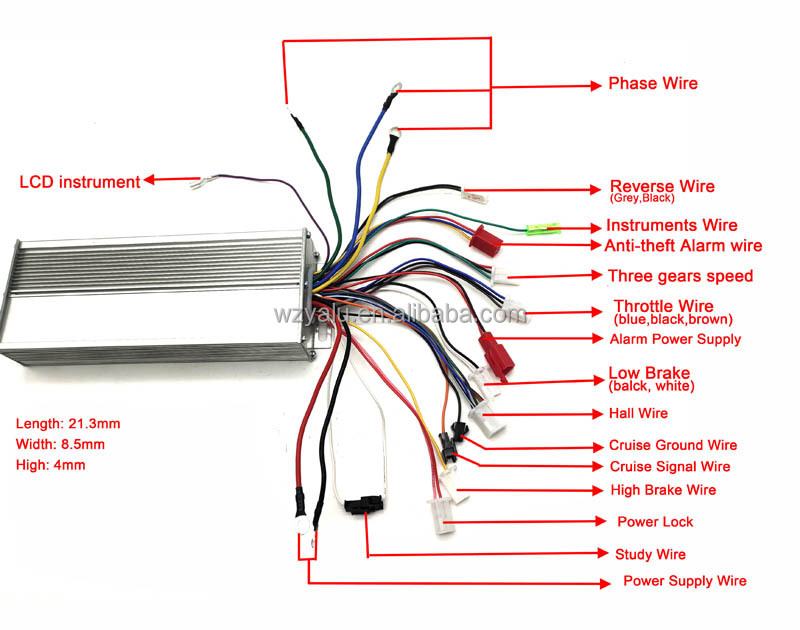
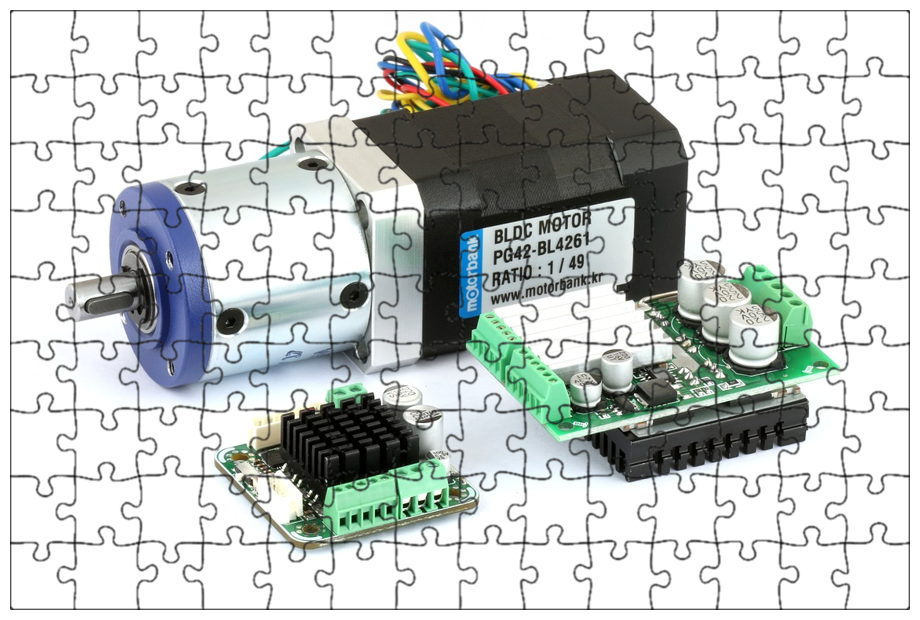
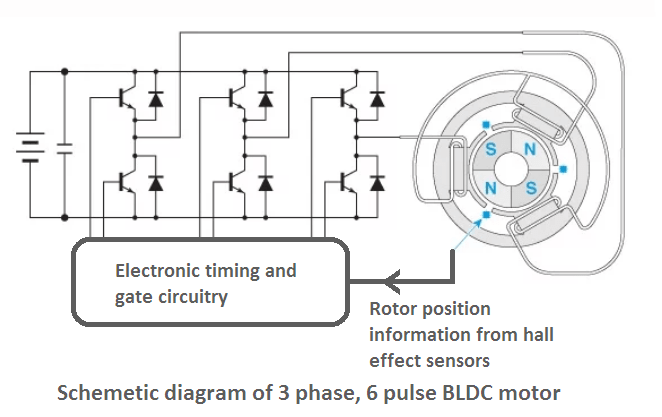
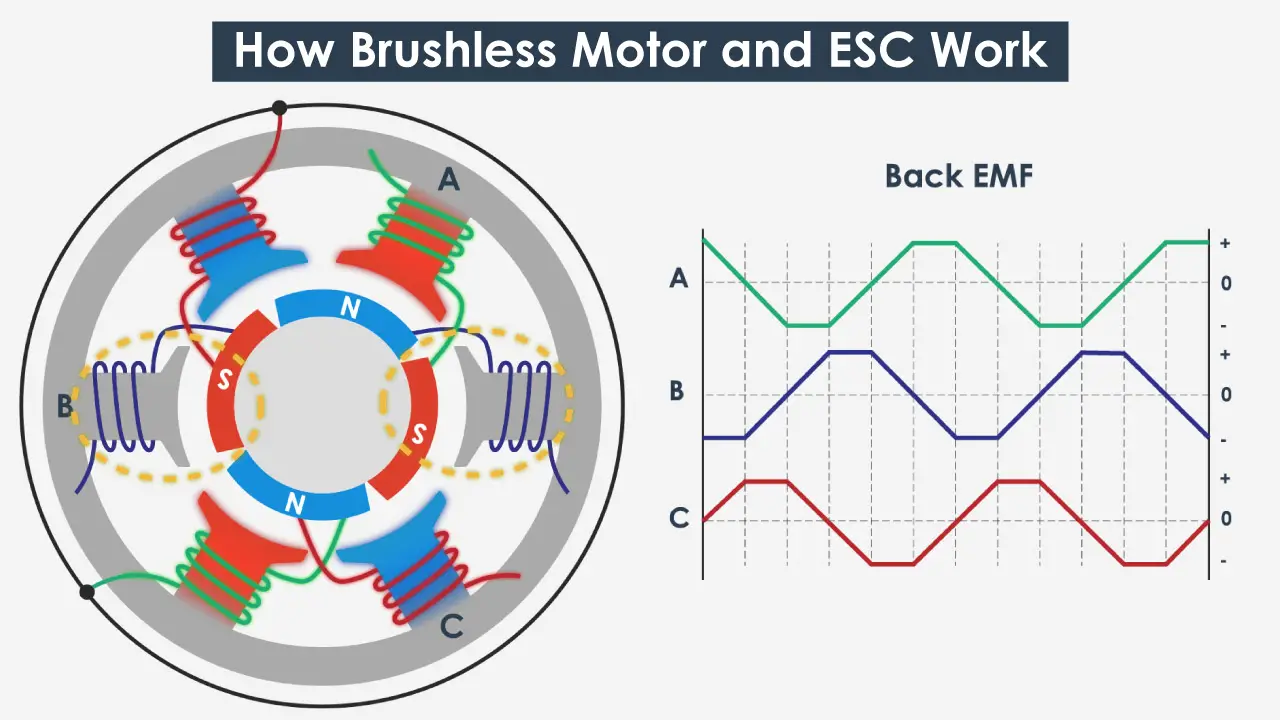
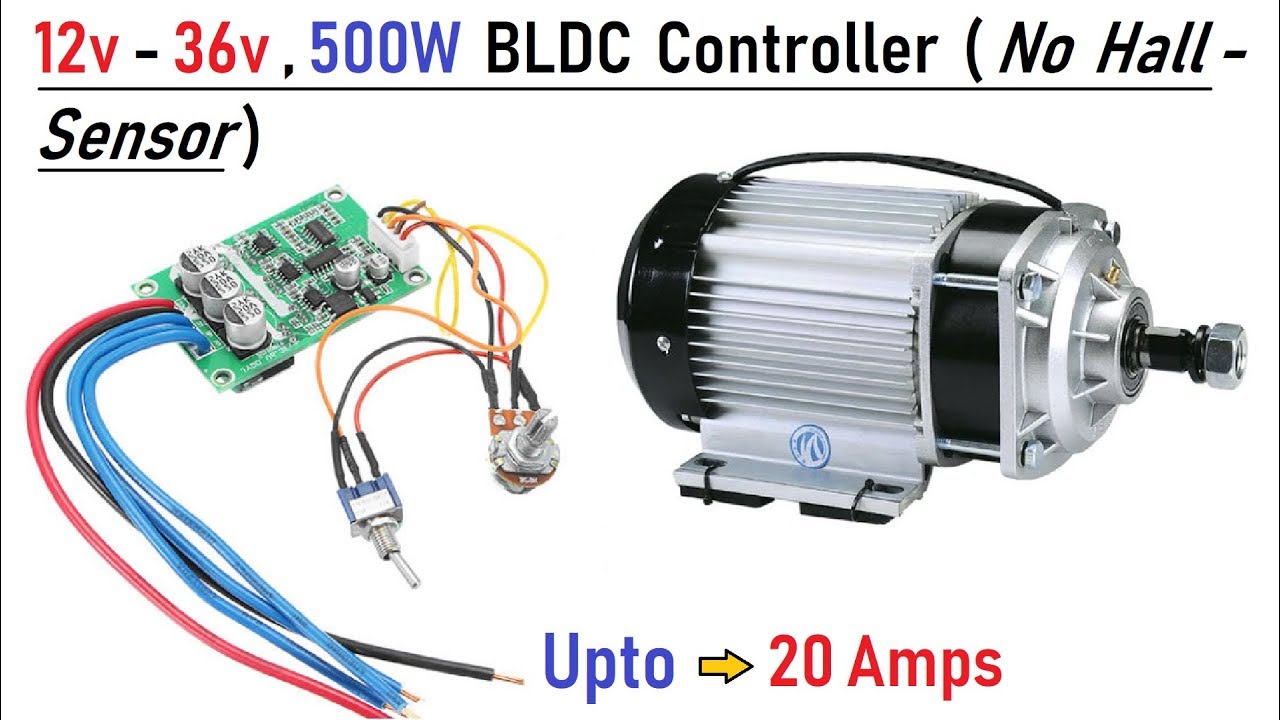
Как мы знаем, каждому двигателю BLDC требуется какой-то контроллер для преобразования постоянного напряжения от батареи в импульсы для питания фазных проводов двигателя. Этот контроллер называется ESC, что означает электронный регулятор скорости. Основная обязанность контроллера — подать питание на фазные провода двигателей BLDC в таком порядке, чтобы двигатель вращался. Это делается путем измерения обратной ЭДС от каждого провода и подачи питания на катушку именно тогда, когда магнит пересекает катушку. Таким образом, внутри ESC есть много блестящего аппаратного обеспечения, которое выходит за рамки этого руководства. Но чтобы упомянуть некоторых, у него есть регулятор скорости и схема удаления батареи.

Управление скоростью на основе PWM: ESC может управлять скоростью двигателя BLDC, считывая сигнал PWM, подаваемый на оранжевый провод. Он работает очень похоже на серводвигатели, предоставляемый сигнал ШИМ должен иметь период 20 мс, а рабочий цикл может быть изменен для изменения скорости двигателя BLDC. Поскольку та же логика применяется и к серводвигателям для управления положением, мы можем использовать ту же библиотеку сервоприводов в нашей программе Arduino. Узнайте, как использовать сервопривод с Arduino здесь.

Цепь выключателя батареи (BEC): почти все ESC идут со схемой исключения батареи. Как следует из названия, эта схема устраняет необходимость в отдельной батарее для микроконтроллера, в этом случае нам не нужен отдельный источник питания для питания нашей Arduino; сам ESC будет обеспечивать регулируемое напряжение +5 В, которое можно использовать для питания нашей Arduino. Существует много типов схем, которые регулируют это напряжение, обычно это будет линейное регулирование на дешевых ESC, но вы также можете найти схемы с переключающими цепями.
Прошивка: каждый ESC имеет программу прошивки, записанную производителем. Эта прошивка во многом определяет реакцию вашего ESC; некоторые из популярных прошивок — Традиционные, Simon-K и BL-Heli. Эта прошивка также программируется пользователем, но мы не будем подробно останавливаться на этом в этом руководстве.
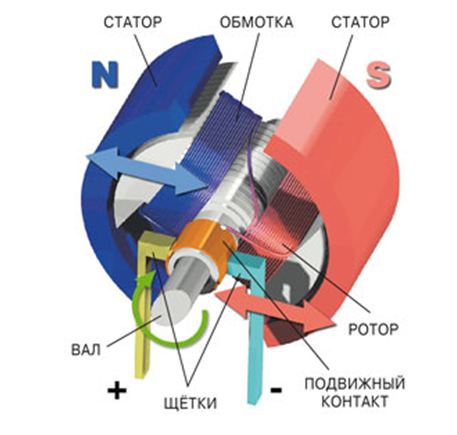
Коллекторный двигатель
Начнём с того, что двигатель — это устройство, которое преобразует какой-либо вид энергии в механический и наоборот. Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
Устройство коллекторного двигателя
Якорь.
Стержнем всей конструкции является якорь, он же металлический вал. Вал является движущимся элементом, от которого зависит крутящий момент. На нём также располагается ротор.
Ротор.
Связан с ведущим валом. Его внешняя конструкция напоминает барабан, который вращается внутри статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники.
Они расположены на противоположных концах якоря для его сбалансированного вращения.
Щётки.
Выполнены обычно из графита. Их задача предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор).
Он выполнен в виде соединенных между собой медных контактов. Во время процесса вращения он принимает на себя энергию с щёток и направляет её в обмотки.
Обмотки.
Расположены на роторе и статоре разных полярностей. Их функция в генерировании собственного магнитного поля под воздействием разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора.
Выполнен из металлических пластин. Может иметь катушку возбуждения с полярным напряжением обмотки ротора. Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.
- Стоимость меньше, чем у бесколлекторных двигателей (БД).
- Конструкция относительно проще конструкции БД.
- В виду этого, техническое обслуживание проще.
На высоких оборотах увеличивается трение щёток. Отсюда вытекает:
- Быстрый износ щёток.
- Снижение мощности инструмента.
- Появление искр.
- Задымление инструмента.
- Выход из строя инструмента раньше его «жизненного цикла».
Характеристики
Основные характеристики двигателя:
- номинальная мощность;
- максимальная мощность;
- максимальный ток;
- максимальное рабочее напряжение;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток;
- угол опережения;
- режим работы;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
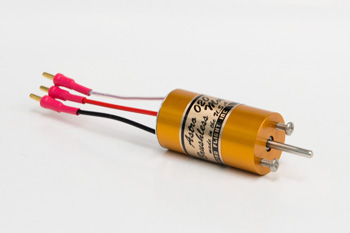 Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток. Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя. Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
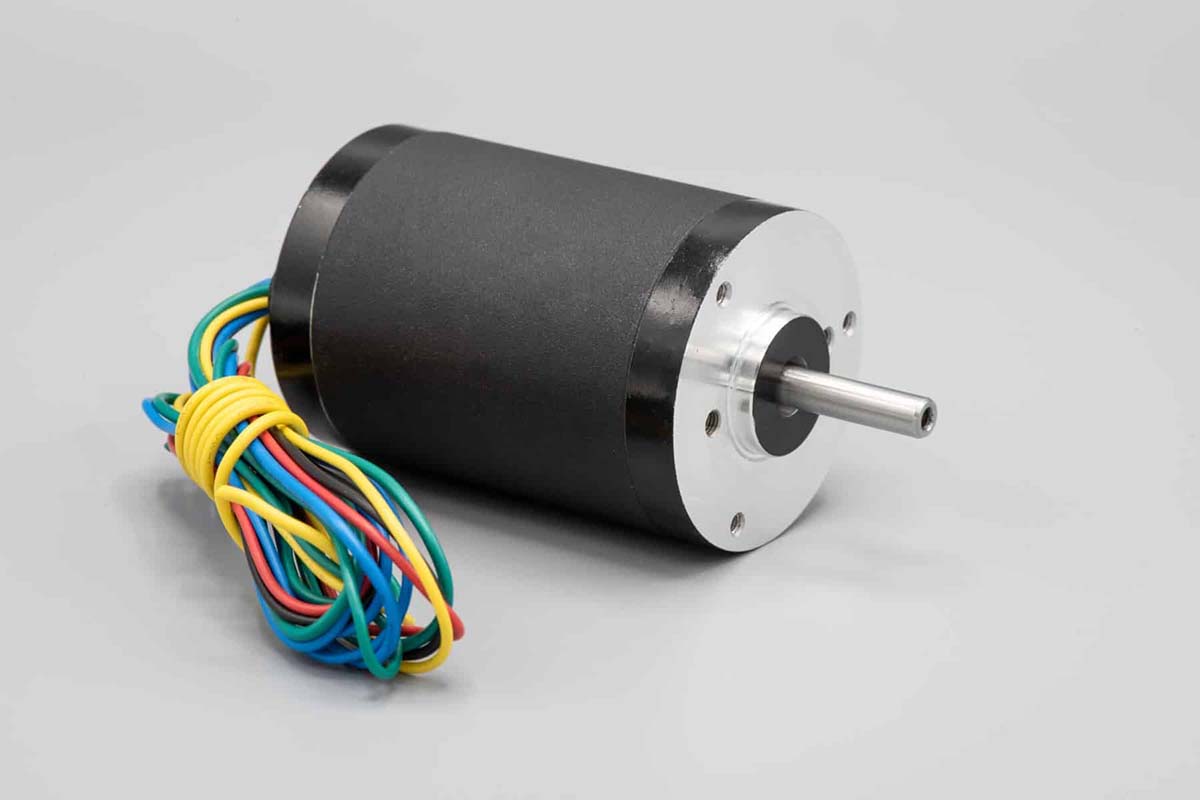
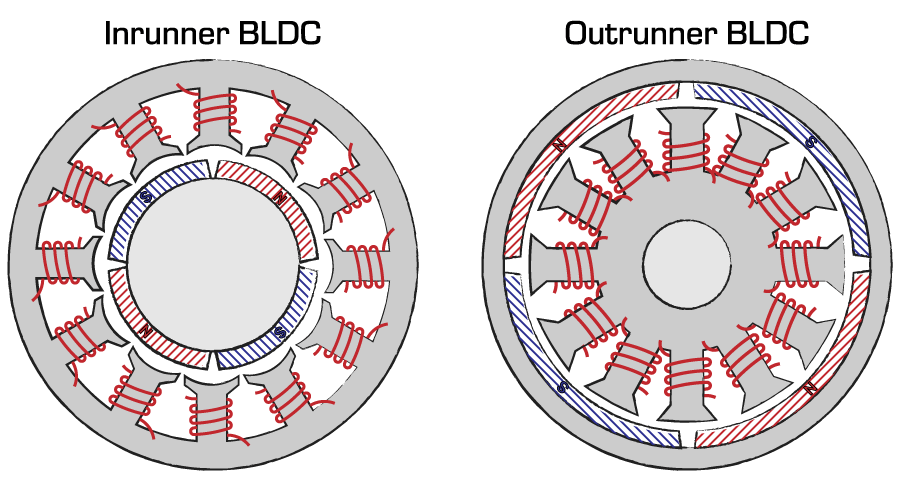
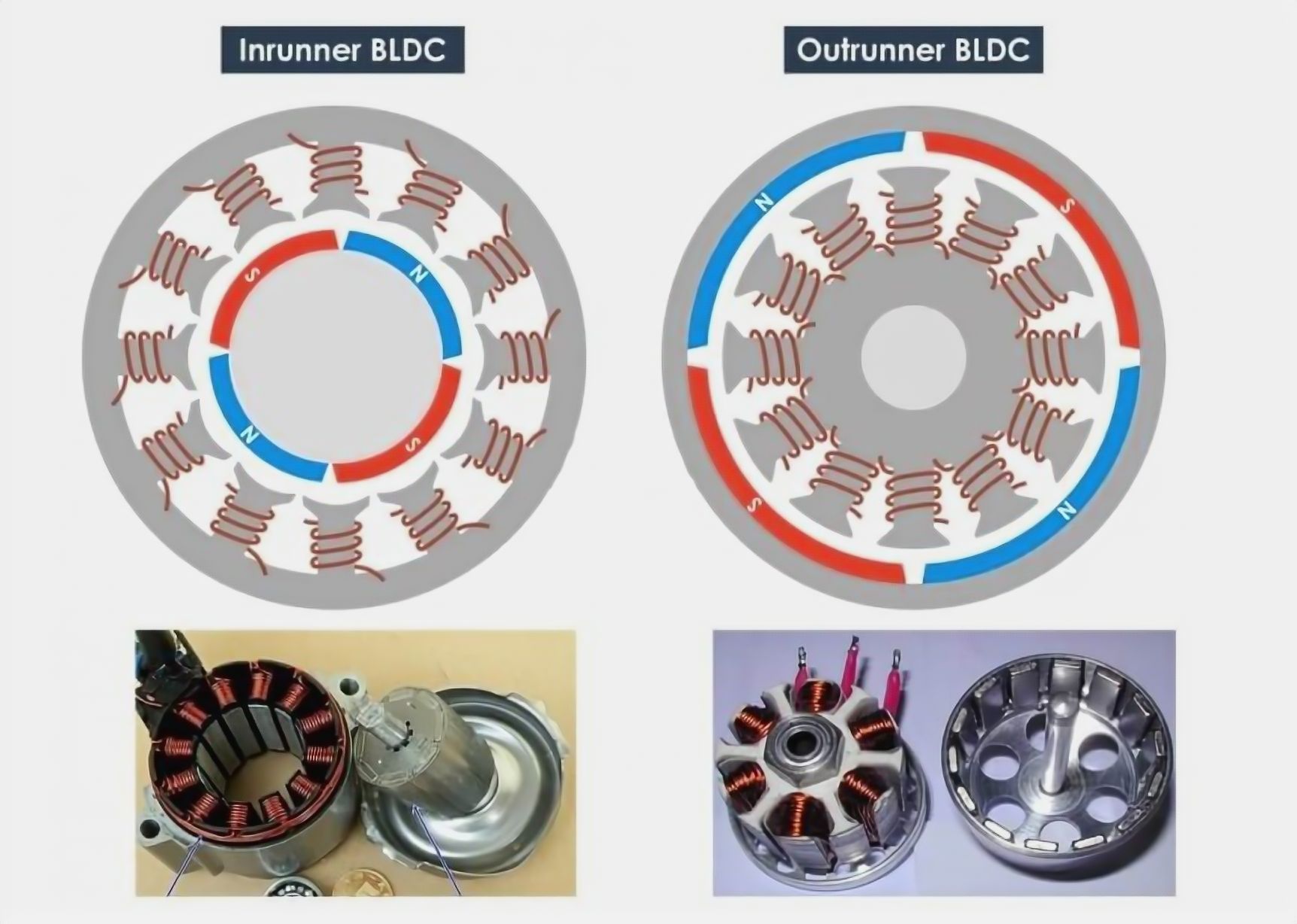
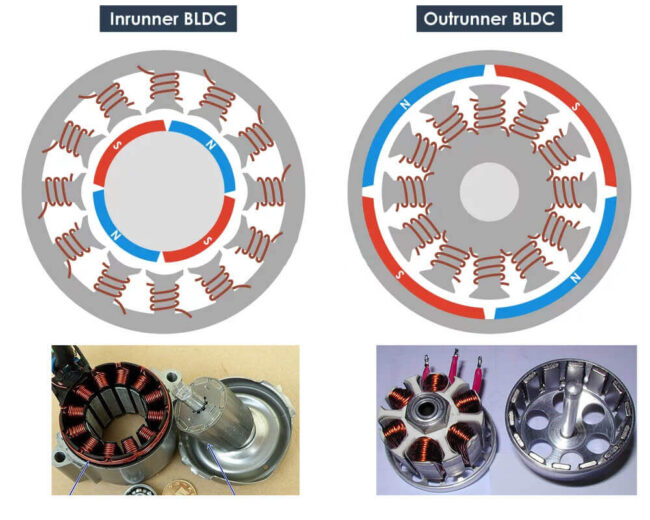
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Особенности конструкции и принцип действия
По сути, коллекторный двигатель – это достаточно специфическое устройство, обладающее всеми достоинствами машины постоянного тока и поэтому имеющее схожие характеристики. Отличие этих двигателей в том, что корпус статора асинхронного двигателя выполнен из отдельных листов электротехнической стали для уменьшения потерь на вихревые токи. Обмотки возбуждения автомата соединены последовательно для оптимизации работы в бытовой сети 220В.
Они могут быть как одно-, так и трехфазными, благодаря возможности работать от постоянного и переменного тока, их еще называют универсальными. Кроме статора и ротора в конструкцию входят щеточный коллекторный механизм и генератор частоты вращения. Вращение ротора в коллекторном двигателе происходит в результате взаимодействия тока якоря с магнитным потоком обмотки возбуждения. Через щетки ток подается на коллектор, собранный из пластин с трапециевидным сечением и одного из узлов ротора, соединенных последовательно с обмотками статора.
В общем, принцип работы коллекторного двигателя можно наглядно продемонстрировать на известном со школы опыте с вращением рамки, помещенной между полюсами магнитного поля. Если по контуру течет ток, он начинает вращаться под действием динамических сил. Направление движения рамки не меняется при изменении направления тока в ней.
Последовательное соединение обмоток возбуждения обеспечивает большой максимальный момент, но появляются высокие холостые обороты, что может привести к преждевременному выходу механизма из строя.
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
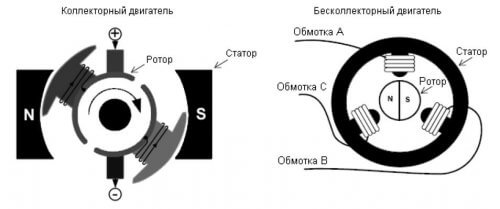
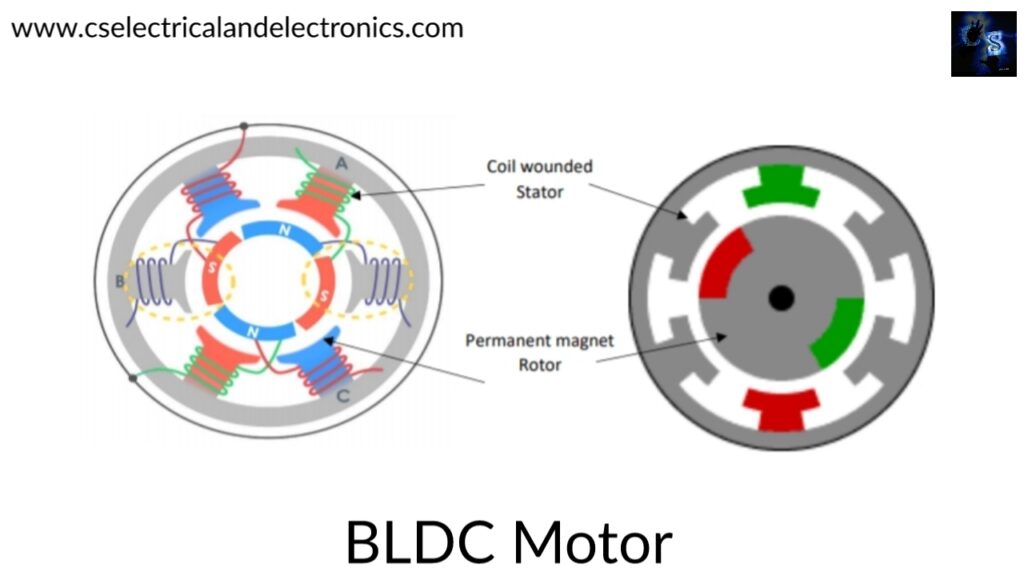
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
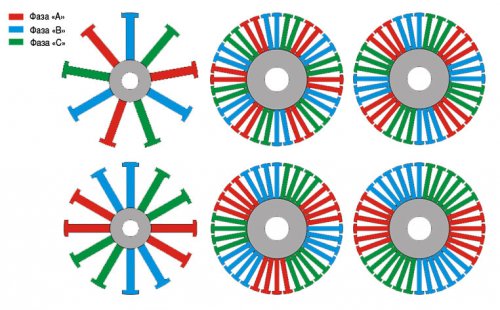
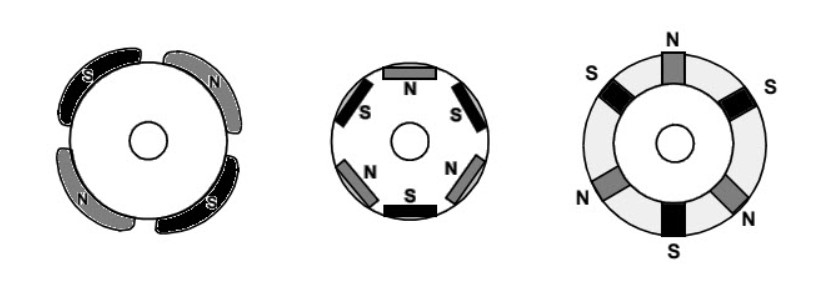
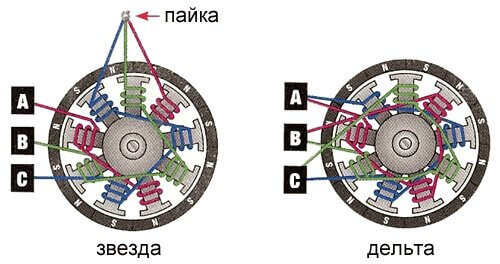
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
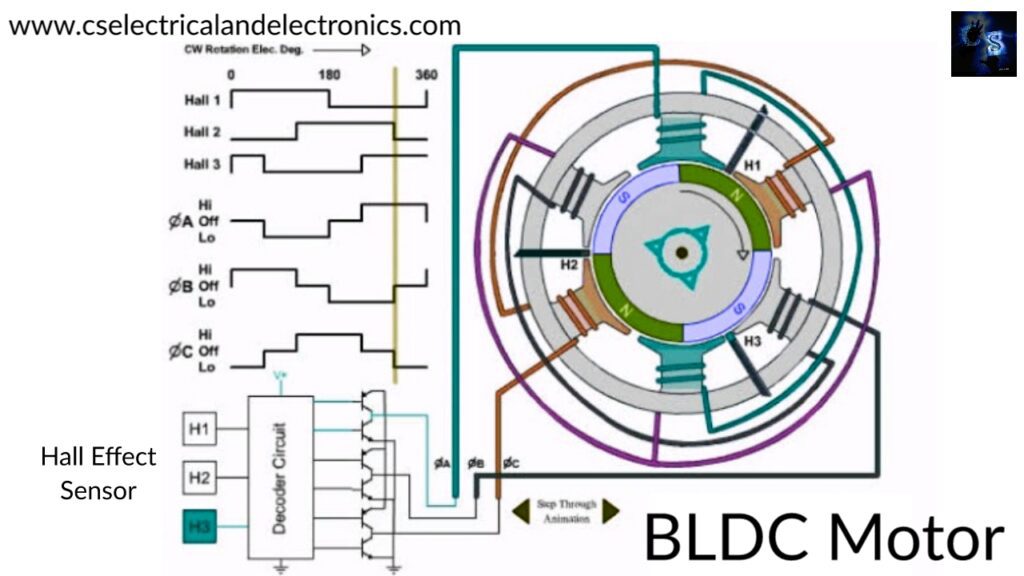
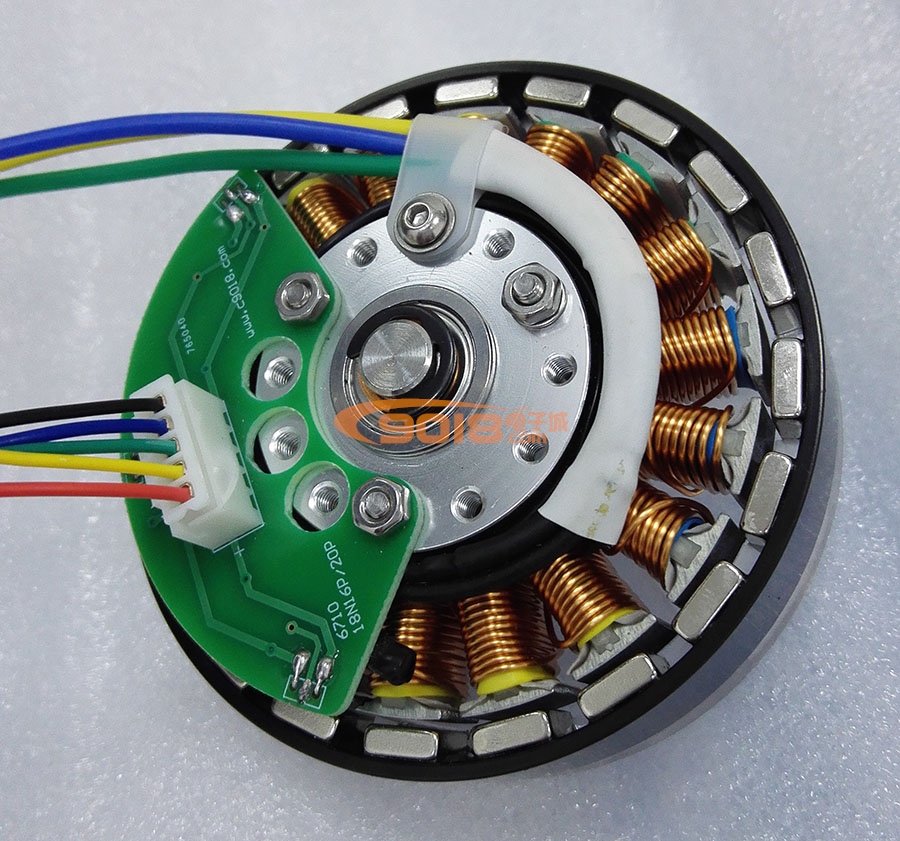
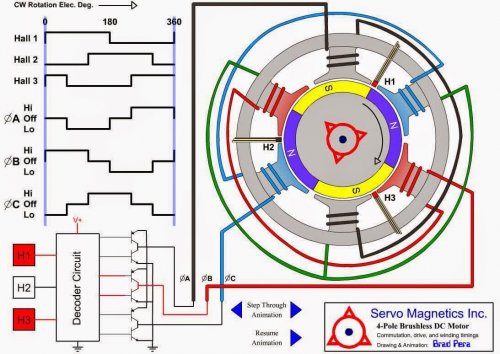
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
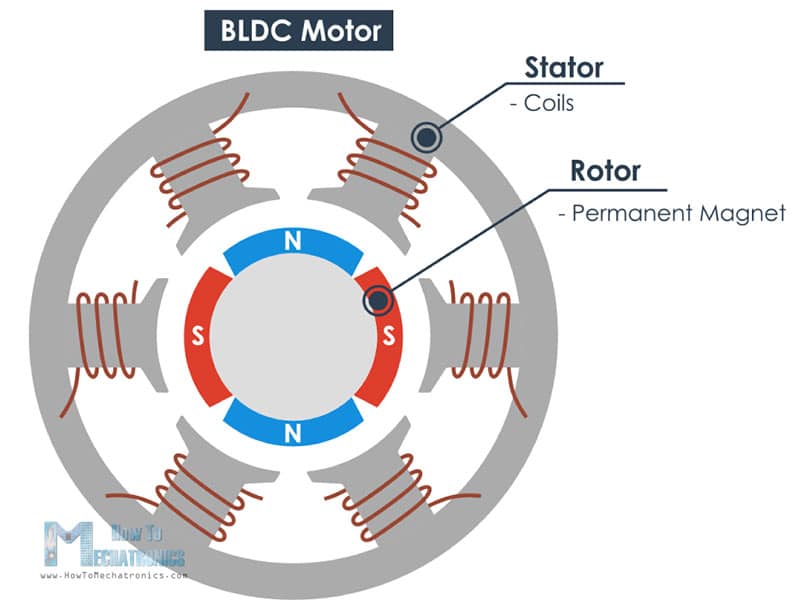
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
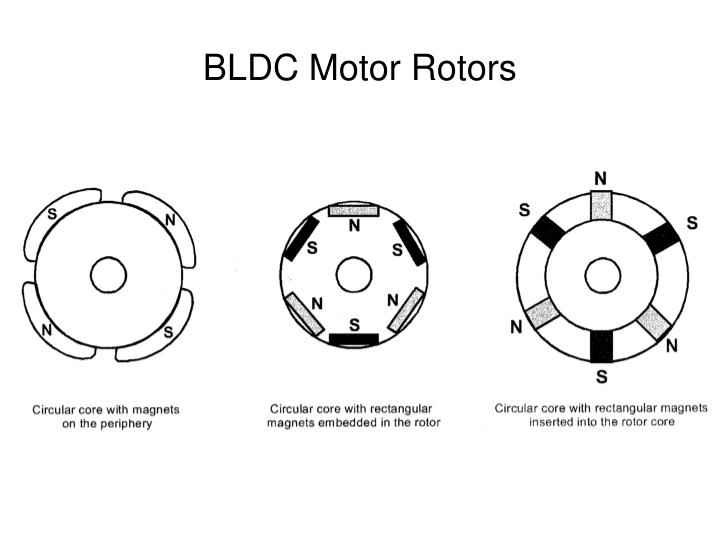
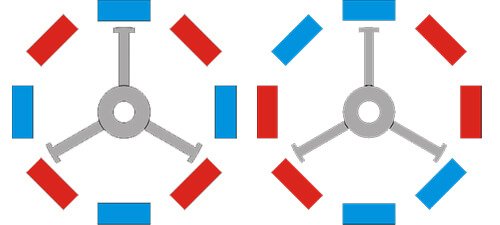
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Конструкция бесколлекторного электро-двигателя и его принцип работы
Как мы обсудили выше, бесколлекторный электро-двигатель не оснащен коллекторным узлом. Его функцию выполняют сетевой переключатель на полупроводниковых триодах.
Именно радиоэлектронный компонент переключает витки провода неподвижной основы двигателя, при котором одновременно возникает магнитное поле активного вращения, которое начинает вступать в действие с полем валом устройства.
В момент протекания электро-тока через объект проводящий ток в зоне магнитного поля, на него давит сила Ам, благодаря которой и возникает вращающийся момент на роторе электро-двигателя.
На такой не сложной работе основан весь принцип действия бесколлекторного двигателя.
Прежде всего, на неподвижной основе бесколлекторного двигателя чаще всего размещенный три витка проводов, по тому же принципу, что и жилы трех фаз в двигателях переменного электро-тока, потому изредка их именуют 3-х фазными, хотя данный термин подходит только отчасти.

Итоговый результат напряжения тока, который поступает на витки, образуется сигналами управления полупроводниковых триодов по схеме «прямоугольник».
Так называемый, 3-х фазный бесколлекторный привод может быть оснащен либо тремя проводами, либо четырьмя, если тип обвития проводов по схеме «звезда».
Витки медных жил располагаются, в так называемых «зазубринах», основы неподвижного элемента устройства.
Ввиду того, что конструкции бесколлекторного двигателя могут отличаться, точно также как и их предназначение, количество витков проводов, катушек или обмоток, что подразумевает одно и тоже, может отличаться. Также существует несколько схем витков.
В зависимости от выбранной схемы, жили витков в каждой зазубрине, могут быть соединены поочередно или напротив друг друга. Также существует аналогичный вариант, как у ДПТ по схеме «звезда» или «треугольник».

Как мы писали выше, все зависит от поставленной цели перед определенным устройством.
Рекомендуем просмотреть рисунки ниже.
Кроме того, неподвижная основа, или статор, может быть оснащена автоматическими датчиками реагирования положения вала. Нередко используют известные и распространенные магнитные микрокомпоненты Холла, которые используются в бытовой технике, например, стиральных машинах.
Именно они могу давать соответствующий сигнальный импульс на контролирующий переключатель, под воздействием магнитного поля вала.
Такой процесс крайне важен, поскольку переключателю необходимо вовремя изменить подачу питания на нужные витки проводов катушки. Благодаря этому, электро-двигатель будет работать максимально эффективно без пустой траты ресурсов.
Чаще всего на один бесколлекторный привод устанавливают три датчика, которых вполне хватает. Однако их наличие немного усложняет конструкцию, но для многих специалистов подвести пару дополнительных кабелей для питания, не составит особого труда.
Кроме того, для активизации работы электро-двигателя всегда монтируются магниты на вале, а для остановки – на неподвижном элементе.
Как вы наверняка знаете, в двигателях с коллекторными узлами принцип в точности наоборот, важно не перепутать этот момент и уделить ему достаточно внимания. Сами магнитные элементы монтируются по чередованию положительного заряда, однако это не значит, что количество элементов прямо пропорционально количеству положительных зарядов
Сами магнитные элементы монтируются по чередованию положительного заряда, однако это не значит, что количество элементов прямо пропорционально количеству положительных зарядов.
Несколько элементов могут образовывать один положительный заряд. Как в случае и с другими электро-двигателями, количество положительных зарядом равно количеству вращений вала в минуту.