

ELF active protection system
ELF blocking Active systems – used in order to block a low-frequency electromagnetic radiation field and to lower its level in a given point, but this is done by creating a second field in the same strength and in opposite direction to the one that was already there. In the point in which both fields are in the same strength, you will be able to measure magnetic field of 0 mGause, but if you move towards one source (ELF original source or the active ELF blocker) the ELF levels will go up, they will still be lower than the original ELF source levels, but now they will be a mathematical sum of the two fields which are in opposite directions. This active system does lower the measured levels but I don’t think this actually reduces the health risk. I think it might even increase it since now your body is exposed to more fields from several directions.
We don’t recommend using an ELF active protection system.
 ELF magnetic fields active protection system (Picture from Dolev LTD)
ELF magnetic fields active protection system (Picture from Dolev LTD)
ELF blocking metal plates
The ELF magnetic fields blocking metal plats are similar to the ELF blocking foil, but they are not flexible and usually used only in the professional market. In order to install it and to apply it on walls, you will need to drill holes and to screw the plates into the wall, ceiling, and floor. The plates are heavy and are made from a verity of metals with different magnetic characteristics. There is usually the need to use several layers, each on with different magnetic polarization. Some of the materials blocks and some observed the ELF fields. These plates are more expensive from the ELF blocking foils and are usually used to block high magnetic fields between 20-200 mG and more.
 ELF magnetic fields blocking metal plates (Picture from Dolev LTD)
ELF magnetic fields blocking metal plates (Picture from Dolev LTD)
 ELF magnetic fields passive protection installed on the back of an electricity cabinet (Picture from Dolev LTD)
ELF magnetic fields passive protection installed on the back of an electricity cabinet (Picture from Dolev LTD)
 ELF magnetic fields passive protection installed on the door of an electricity cabinet (Picture from Dolev LTD)
ELF magnetic fields passive protection installed on the door of an electricity cabinet (Picture from Dolev LTD)
Полеты экипажем на длительные расстояния
Полеты экипажем в симуляторе имеют один характерный недостаток: двоим пользователям намного труднее найти время, когда оба свободны для онлайн игр. Кроме всего прочего каждого могут позвать в любой момент т.к. у каждого работа, семья, друзья. Обычно мы выполняем полеты около 1 часа, или чуть более. Но есть интересные маршруты, которые за один час не одолеть… До этого нам приходилось их игнорировать. Так вот, сегодня мы с Максимом при тестировании маяков, попробовали сохраниться и потом загрузиться и полететь дальше. Это работает!
- Сначала мы поставили на паузу, постарались сделать это синхронно, на счет «три».
- Сохранились на ПК (не в облако).
- Потом независимо друг от друга загрузили полет и нажав «полет» немедленно поставили оба на паузу
- Затем соединились по Yourcontrols
- Сняли с паузы также синхронно
- Обнаружили, что у нас прибавилось топлива
- Продолжили полет и совершили удачную посадку, как и планировали.
В DC-6 есть некоторые детали: нужно запомнить количество топлива и потом установить каждому вручную, автопилот при новом подключении подключать снова, нужно проверить двигатели (состояние) каждому до подключения Yourcontrols. Кроме всего прочего погода будет новой, но это не такая большая проблема, она и в реальности может измениться. Самое главное, что мы теперь не ограничены полетами в один час!
Эта система навигации встроена в модель Boeing 247D — выставляете частоту на радиостанции, отдельный плагин не требуется. Более того! При полете можно прослушать музыкальные радиостанции тех времен!
Infinite and finite impulse response
Let’s first take a look at the advantages and disadvantages of the IIR response, then the FIR response and finish with a quick summary and overview of both.
The main advantage of IIR filters over FIR filters is their efficient implementation, which helps them to meet specifications in terms of pass-band, stop-band, ripple and/or roll-off. For this, we require a lower order IIR filter, compared to a similar FIR filter. This effectively corresponds to fewer calculations needed, resulting in rather large computational savings. The best use of IIR filters is when the linear characteristics are not of concern and for lower order tapping.
The main disadvantages of IIR are instability, feedback, non-linearity and has limited cycles.
FIR, on the other hand, can make linear characteristics always possible, requires no feedback, is inherently stable, can be easier to design for meeting particular frequency responses and does not have limited cycles. The disadvantage of FIR filters is that they require more memory and computing power than an IIR with similar sharpness or selectivity, particularly when it comes to lower order tapping.
The following table offers a quick comparison of IIR and FIR filter:
Преимущества системы Low Frequency Protection
1. Защита от опасных низких частот
Система Low Frequency Protection предоставляет эффективную защиту от опасных низких частот, которые могут негативно влиять на здоровье человека и оборудование. Она позволяет фильтровать и ограничивать низкочастотные сигналы, обеспечивая безопасность и комфорт в помещении.
2. Улучшение качества звука
Система Low Frequency Protection способна значительно улучшить качество звука в помещении. Она устраняет нежелательные низкие частоты, которые могут приводить к помехам и искажениям звука. В результате, звук становится более чистым, четким и приятным для слушателя.
3. Повышение эффективности оборудования
Низкие частоты могут негативно влиять на работу различных электронных и электромеханических устройств, особенно на аудио- и видеоаппаратуру. Система Low Frequency Protection позволяет избегать снижения производительности и повреждений оборудования, что значительно повышает его эффективность и срок службы.
4. Сохранение энергии
Низкие частоты потребляют большое количество энергии. С помощью системы Low Frequency Protection можно избежать ненужных расходов электроэнергии, так как она позволяет ограничивать и фильтровать низкочастотные сигналы, требующие большой мощности для воспроизведения.
5. Гарантия безопасности
Опасные низкие частоты могут вызывать различные заболевания и проблемы со здоровьем, такие как головные боли, усталость, нарушение сна и другие. Система Low Frequency Protection обеспечивает безопасность, предотвращая воздействие вредных низкогочастотных сигналов на организм человека и создавая комфортные условия для пребывания в помещении.
Сравнение Low Frequency Protection с другими системами
Критерий
Low Frequency Protection
Другие системы
Эффективность
Высокая
Различна
Качество звука
Высокое
Различное
Потребление энергии
Экономичное
Высокое
Состояние здоровья
Безопасное
Риск для здоровья
Шумоподавление АНК:
ANC — это активный контроль шума, который активно снижает шум. Основной принцип заключается в том, что система шумоподавления создает обратные звуковые волны, равные внешнему шуму, нейтрализуя шум. На рисунке 1 представлена принципиальная схема наушников с активным шумоподавлением прямой связи. Чип ANC расположен внутри наушника. Ref mic (эталонный микрофон) собирает окружающий шум в наушниках. Error mic (Ошибочный микрофон) Собирает остаточный шум после шумоподавления в наушниках. Динамик воспроизводит шумоподавление после обработки ANC.






На рисунке 2 представлена схематическая диаграмма системы АНК с тремя уровнями, разделенными пунктирными линиями. Самый верхний основной путь — это акустический канал от опорного микрофона к микрофону ошибки, функция отклика представлена P(z)P(z); средний уровень — это аналоговый канал, где вторичный путь — это путь от выхода адаптивного фильтра до обратного остатка. Включая ЦАП, фильтр реконструкции, усилитель мощности, воспроизведение через динамик, повторный сбор данных, предварительный усилитель, фильтр сглаживания, АЦП; нижний уровень — это цифровой тракт, где адаптивный фильтр постоянно корректирует весовой коэффициент фильтра, чтобы уменьшить остаток до сходимости. Наиболее распространенным решением является реализация адаптивного фильтра с использованием КИХ-фильтра в сочетании с алгоритмом LMS. Упростите рисунок 2 и получите рисунок 3.
Позвольте мне кратко рассказать о принципах адаптивного фильтра и алгоритме LMS (наименьший средний квадрат), а затем о рисунке 3. Как показано на рисунке 4, при наличии входных данных xx и желаемого выходного значения dd адаптивный фильтр обновляет коэффициенты на каждой итерации так, что разница между выходными данными yy и dd становится все меньше и меньше, пока остаток не станет достаточно близок к нулю и не сойдется. LMS — это алгоритм обновления адаптивных фильтров. Целевая функция LMS представляет собой квадрат мгновенной ошибки e2(n)=(d(n)−y(n))2e2(n)=(d(n)−y(n))2, чтобы минимизировать целевая функция. Применение градиентного спуска дает обновленную формулу алгоритма. (Алгоритмическая идея использования градиентного спуска для минимизации цели и получения обновленной формулы искомого параметра очень распространена, например, линейная регрессия.) Формула обновления алгоритма LMS с использованием FIR-фильтра: w(n+1) ) =w(n)+μe(n)x(n)w(n+1)=w(n)+μe(n)x(n), где μμ — размер шага. Если размер мкм регулируется с помощью итерации, это пошаговый алгоритм LMS.
Давайте поговорим о рисунке 3. Здесь адаптивный фильтр выводится после S(z)S(z) для сравнения с желаемым выходным сигналом. S(z)S(z) вызовет нестабильность. В литературе говорится, что «сигнал ошибки неправильно «выровнен» по времени с опорным сигналом», сходимость LMS нарушена. (Я не понял, что это значит T__T) Эффективным методом является FXLMS (Filtered-X LMS), который позволяет вводить x(n) в модуль LMS через Sˆ(z)S^(z), Sˆ( z S^(z) — оценка S(z)S(z). Цель FXLMS:
E2(n)=(d(n)−s(n)∗)2,
E2(n)=(d(n)−s(n)∗)2,
Итак, градиент=−2e(n)s(n)∗x(n)−2e(n)s(n)∗x(n), где s(n)s(n) неизвестно, с его оценочной аппроксимацией, поэтому Формула обновления FXLMS:
w(n+1)=w(n)+μe(n)x'(n),
w(n+1)=w(n)+μe(n)x'(n),
Где x'(n)=sˆ(n)∗x(n)x'(n)=s^(n)∗x(n).
Когда адаптивный фильтр сходится, E(z)=X(z)P(z)−X(z)W(z)S(z)≈0E(z)=X(z)P(z)−X(z ) W(z)S(z) ≈ 0, поэтому W(z) ≈ P(z)/S(z) W(z) ≈ P(z)/S(z). То есть весовой коэффициент адаптивного фильтра определяется основным путем и вторичным путем наушников. Первичный путь и вторичный путь гарнитуры относительно стабильны, поэтому весовой коэффициент адаптивного фильтра относительно стабилен. Поэтому для простоты весовые коэффициенты наушников ANC некоторых производителей определяются на заводе. Конечно, качество прослушивания этих наушников ANC, очевидно, не так хорошо, как у наушников ANC с настоящим адаптивным смыслом, потому что в реальных ситуациях внешний шум относительно направления наушников, различные температуры и тому подобное могут влиять на отклик канала наушников.
Проверка Матлабом
Напишите код Matlab, используя адаптивный фильтр LMS с переменным размером шага, результаты моделирования показаны на рисунке 5. В диапазоне от 0 до 2 кГц используется ANC прямой связи для устранения гауссовского белого шума, а затухание шума составляет 30 дБ+. в среднем. FXLMS в библиотеке Matlab имеет фиксированный шаг, и эффект хуже.
What is an Active Filter?
An active filter is a type of filter that includes one or more active circuit components such as a transistor or an operational amplifier (Op-Amp). They derive their energy from an external source of energy and use it to increase or amplify the signal output.
Operational amplifiers adjust the filter’s output by narrowing or widening the bandwidth, creating a selective response to frequencies.
An Op-Amp has a high input impedance, a low output impedance and a voltage gain within its feedback loop arising from the mixture of the resistor. Active filters, when used with careful circuit design, generate excellent performance features, very good precision with a steep roll-off and low noise.
General Diagram for Active Filter
Before we start
Before installing EMF Protection you need to measure the EMF and to find all sources and penetration points.Using Radio Frequency(RF) emitting devices inside a protected area should be avoided! ELF shielding should be used to keep the ELF from outside entering your house. Most types of ELF Sheffield will block and reflect also RF radiation. If you use RF emitting devices inside the shielded area you risk that the RF will bounce back from the shielding. Therefore, when ELF shielding is used, we believe you should not use any wireless devices inside the shielded area.DIY EMF/EMR shielding should be done only by those who have the knowledge and on their own responsibility
Table of Contents
Applications
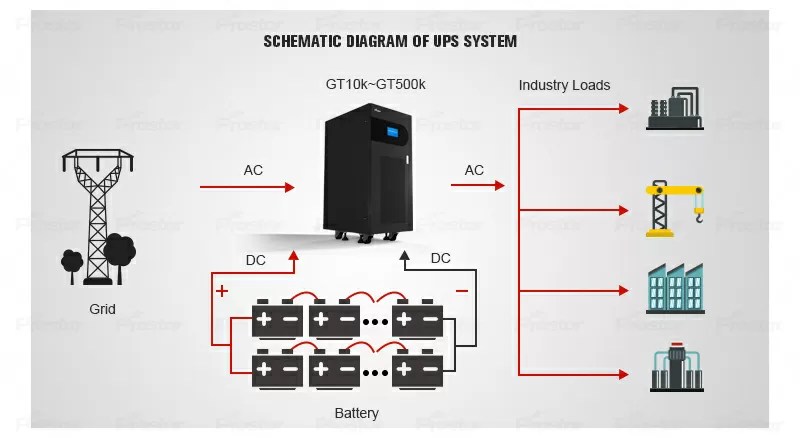
Data Centers
Data centers store and process massive amounts of critical information. A momentary power disruption could lead to data loss and costly downtime. It ensures continuous power supply, safeguarding data integrity and business continuity.
Medical Facilities
Hospitals and medical facilities rely heavily on uninterrupted power for life-saving equipment and patient care systems. It ensures critical medical devices remain operational even during power fluctuations or failures.
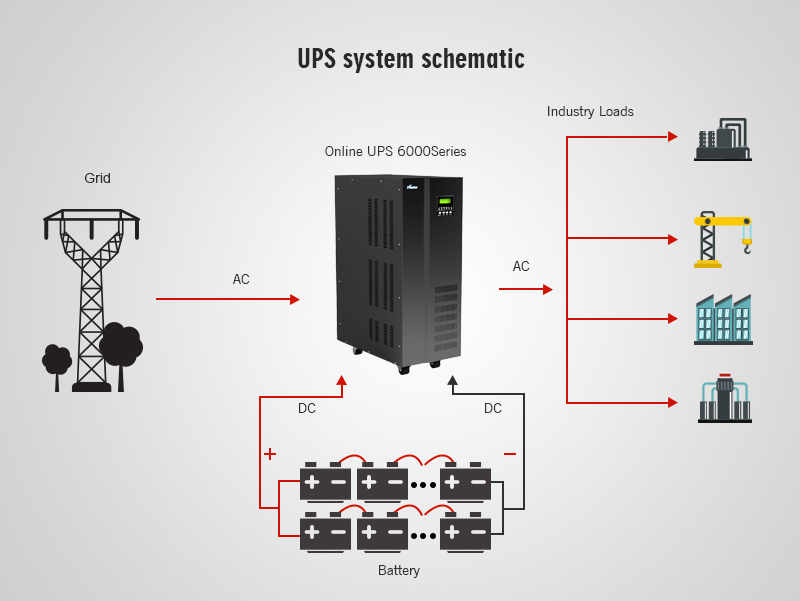
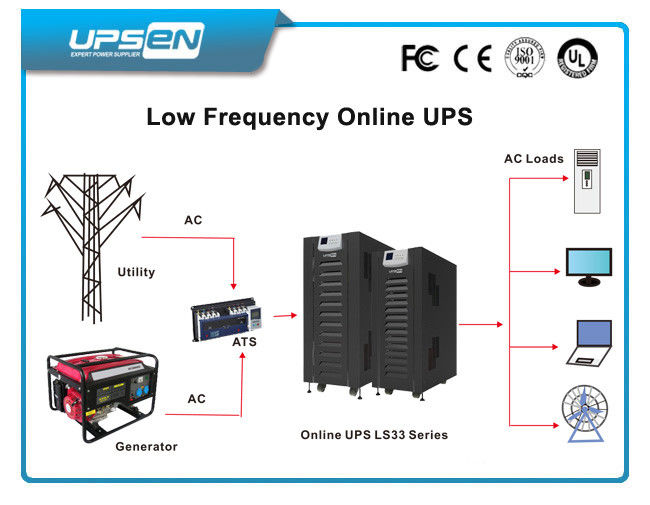
Industrial Processes
Many industrial processes, such as manufacturing and production lines, require a stable power supply to prevent costly downtime, product defects, and potential hazards to workers.
Financial Institutions
Banks and financial institutions heavily rely on real-time transaction processing. A power outage during financial transactions could lead to severe monetary losses and erode customer trust.






Prototypes of filters:
| Butterworth — Butterworth is without the ripple and maintains the shape with higher orders. Roll-off is defined with (-20 dB/decade)*order. It is also known as maximally flat magnitude, suggesting that the filter response is really flat in the passband. |
| Chebyshev I — sometimes the selection of the filters is defined by the application, but in general, the Chebyshev has the highest roll-off of all three, but has a ripple in the passband and doesn’t maintain the shape with higher orders. |
| Bessel — Bessel filter is the filter with maximally linear phase response. The roll-off, however, is the least steep of all three filter types. |
First Order Active Low Pass Filter
A first-order active low pass filter is a simplistic filter that is composed of only one reactive component Capacitor accompanying with an active component Op-Amp. A resistor is utilized with the capacitor or inductor to form RC or RL low pass filter respectively. In a passive circuit, the output signal amplitude is smaller than the input signal amplitude.
To surmount this problem, active circuit designs were introduced. When a passive low pass filter is connected to an Op-Amp either in inverting or non-inverting condition, it gives an active low pass filter design. The connection of a simple RC circuit with a single Op-Amp is shown in the image below.First Order Active Low Pass Filter with the frequency response
This RC circuit assists in providing a low-frequency signal to the input of the amplifier. The amplifier operates as a unity gain output buffer circuit. This circuit has added input impedance value. The Op-Amp of the circuit has a very low output impedance value, which helps in providing high stability to the filter.
When compared with passive filter, an active filter has an arrangement in which the amplifier is designed as a voltage-follower (Buffer) which gives a DC gain of one. This configuration provides excellent stability to the filter and has a high power gain. The main drawback of this filter is that it has no voltage gain above one, which can be rectified with extra circuit design.
Применение системы Low Frequency Protection
Система защиты от низкочастотного излучения (Low Frequency Protection) находит свое применение в различных сферах деятельности, где требуется обеспечение безопасности и защиты от негативного воздействия низкочастотных источников.
Медицина. В медицинских учреждениях система Low Frequency Protection может использоваться для защиты от низкочастотного излучения, создаваемого медицинским оборудованием. Она способна обеспечить безопасность пациентов и персонала, минимизируя воздействие низкочастотного излучения на организм.
Электроэнергетика. В электроэнергетической отрасли система Low Frequency Protection может быть применена для защиты от негативного воздействия электромагнитных полей, создаваемых электроустановками и линиями электропередачи. Она помогает предотвратить возникновение электростатических разрядов и снижает риск возникновения аварийных ситуаций.
Производство. В производственных помещениях система Low Frequency Protection может быть задействована для обеспечения безопасности работников. Она помогает минимизировать воздействие низкочастотного электромагнитного излучения на организм человека, предотвращает развитие заболеваний, связанных с его воздействием.
Жилье и офисы. В жилых и офисных помещениях система Low Frequency Protection может быть установлена для защиты от низкочастотных источников излучения, таких как электрические устройства и сетевые провода. Она обеспечивает безопасность проживания и работы людей, снижает риск возникновения заболеваний, связанных с воздействием низкочастотных полей.
В зависимости от конкретной ситуации и целей использования, система Low Frequency Protection может иметь различные характеристики и функционал. Ее применение способствует снижению рисков, связанных с негативными воздействиями низкочастотного излучения, и обеспечивает безопасность в соответствующих областях деятельности.
Вопросы и ответы
а. Почему ANC предназначен только для низкочастотного шума ниже 2 кГц?С одной стороны, физическая звукоизоляция наушников (пассивное шумоподавление) позволяет эффективно блокировать высокочастотный шум, и для снижения высокочастотного шума нет необходимости использовать ANC. С другой стороны, низкочастотный шум имеет большую длину волны и может выдерживать определенную фазовую задержку, тогда как высокочастотный шум имеет короткую длину волны и чувствителен к отклонению фазы, поэтому ANC устраняет высокочастотный шум.
б. Когда электронная задержка больше первичной задержки, как можно значительно снизить производительность алгоритма?Задержка P(z) мала, задержка S(z) велика, например P(z)=z-1, S(z)=z-2, только тогда, когда W(z)=z может соответствовать требованиям, не — причинное, недостижимое.
в. В чем разница между ANC с прямой связью, узкополосным ANC с прямой связью и ANC с обратной связью?Структура Feedforwad имеет опорный микрофон и микрофон ошибок, которые собирают внешний шум и внутренние остаточные сигналы соответственно. Структура обратной связи имеет только один микрофон ошибки, а опорный сигнал генерируется микрофоном ошибки и выходом адаптивного фильтра.
Широкополосная прямая связь представляет собой структуру, описанную выше. В узкополосной структуре источник шума формирует сигнал триггерного генератора сигналов, а генератор сигналов формирует опорный сигнал для адаптивного фильтра. Применимо только для устранения периодического шума.
ANC с обратной связью использует микрофон ошибок для восстановления сигнала, собранного опорным микрофоном в структуре прямой связи, поскольку у него есть только микрофон ошибок. Траектория не удовлетворяет причинному ограничению, поэтому исключаются только предсказуемые компоненты шума, т. е. узкополосный периодический шум. Следует отметить, что если прямая связь не удовлетворяет причинному ограничению, т. е. электронная задержка превышает акустическую задержку основного канала, она может устранить только узкополосный периодический шум.
Существует также гибридная структура ANC, которая включает в себя как структуры прямой связи, так и структуры обратной связи. Основное преимущество заключается в том, что вы можете сохранить порядок адаптивного фильтра.
Derivation
The derivative of a function of a real variable measures the sensitivity to change of a quantity (a function or dependent variable) which is determined by another quantity (the independent variable).
For example, the derivative of the position of a moving object with respect to time is the object’s velocity: this measures how quickly the position of the object changes when time is advanced.
The derivative of a function can be geometrically interpreted as the slope of the curve of the mathematical function f(x) plotted as a function of x. But its implications for the modelling of nature go far deeper than this simple geometric application might imply. Its importance lies in the fact that many physical entities such as velocity, acceleration, force and so on are defined as instantaneous rates of change of some other quantity. The derivative can give you a precise instantaneous value for that rate of change and lead to precise modelling of the desired quantity.
The derivate of the function f(x) evaluated at x=a gives the slope of the curve at x=a.
Image 53: Visual representation of derivation
Terminology
Here is a short list of terms that will be used in this tutorial. Some terms might not be explained here, but will have an explanation later in the text.
- Attenuate — to decrease the amplitude of an electronic signal, with little or no distortion.
- Low-pass filter — a filter that passes low frequencies and attenuates the high ones.
Image 1: Representation of frequency band that is visible after Low-pass filtering
-
High-pass filter — a filter that passes high frequencies and attenuates the low ones.
Image 2: Representation of frequency band that is visible after High-pass filtering
- Band-pass filter — a filter that passes only frequencies in a specific band.
Image 3: Representation of frequency band that is visible after Bandpass filtering
-
Band-stop filter — a filter that only attenuates frequencies in a specific band.
Image 4: Representation of frequency band that is visible after Bandstop filtering
- Notch filter — a filter that rejects only a specific frequency (an extreme band-stop filter).
- Comb filter — a filter that has multiple regularly spaced narrow pass-bands.
- All-pass filter — a filter that passes all frequencies, but the phase of the output is modified.
- Cutoff frequency — the frequency beyond which the filter will not pass a signal.
- Roll-off — a rate at which attenuation increases beyond the cutoff frequency. The steepness of the transition between the pass-band and stop-band.
- Transition band — the band of frequencies between a pass-band and stop-band.
- Ripple — the maximum amplitude error of the filter in the passband in dB.
- The order of the filter — the degree of the approximating polynomial (increasing order increases roll-off and brings the filter closer to the ideal response).
Comparing analogue and digital filters
Analogue filters are much more subjected to non-linearity (resulting in smaller accuracy) because the electronic components that are used for filtering are inherently imperfect and often have values specified to a certain tolerance limit (resistors often have a tolerance of ±5% ). This can be further affected by temperature and time changes. The elements of the circuits also introduce thermal noise, because every element is subject to heating. As we might expect, the more complex the circuit, the greater the magnitude of component errors. On top of that, analogue filters cannot have a FIR response because it would require delay elements.




But where they shine is high-frequency filtering, low latency, and speed. Like it was mentioned in the converter section, a digital filter can not work without preemptive anti-alias filtering, which can only be achieved with a low-pass analog filter. The speed of the analog filter can easily be 10 to 100 times that of a digital one. Also worth mentioning is that in very simple cases, an analog filter surpasses its digital counterpart in terms of cost efficiency.
The digital filter shines in a lot of areas where the analog does not. It is more accurate, supports both IIR and FIR, it can be programmed, making them easier to build and test while giving them greater flexibility. It’s also more stable since it isn’t affected by temperature and humidity changes. They are also far superior in terms of cost efficiency, especially as the filter gets more complex.
The downsides of digital filters are latency because the signal has to go through two converters and still be processed at high frequencies. In today’s modern circuits, both filters are used to complement each other and achieve maximum speed and accuracy.
A comparison of digital and analog filters:
Выводы:
- Система радионавигации LFR позволяет летать по историческим маршрутам авиалиний. Интересно ощутить себя на месте пилотов тех лет
- Возможно создавать свои маяки чтобы сохранить «стиль старинной радионавигации» и отказаться от использования GPS или «волшебных карт» на старинных самолетах.
- При полете экипажем увеличивается натуральная востребованность каждого пользователя — нужно все время слушать маяк, чтобы контролировать положение самолета.
- Для дальних перелетов или перелетов в «дикие» места, как например в Антарктику, эта система не годится из-за ограниченного радиуса действия, т.к. была задумана для создания сети авиа маршрутов. Для Антарктики и подобных мест надо осваивать полеты с расчетами координат по сектанту.
- В связи с возможностью сохранения полета и продолжения его далее (когда появилось свободное время), мы больше не ограничены по времени полетов экипажем.
Спасибо Максиму за его терпение в этом эксперименте!